camera와 3d LiDAR sensor fusion을 통한 object detection
RGB image와 3D point cloud 데이터를 사용하여 객체 인식 모델을 학습하고 data association 수행
개발 기간 : 2024.01 ~ 2024. 02
- 프로젝트 소개
- 실행 방법
- 결과
- 전체 과정
- 파일 구조
- 결과 영상
- Stacks

- 2D 이미지를 기반으로 YOLO v7 모델을 학습하며 2D Object Detection을 수행한다
- 3D Point Cloud를 기반으로 centerpoint 모델을 학습하여 3D Object Detection을 수행한다
- 3D Object와 2D Object 간에 data association을 통해 object detection 성능을 높인다
- LiDAR 정보를 사용하여 object의 depth를 구한다
python our_demo_nahye.py --cfg_file [centerpoint 모델] --ckpt [centerpoint weight] --data_path [centerpoint dataset] --weight [YOLO v7 weight] --conf [confidence 값] --img-size [YOLO v7 input image size] --source [YOLO v7 dataset]
python our_demo_nahye.py --cfg_file /workspace/yolo_cp/tools/cfgs/kitti_models/centerpoint_yolo.yaml --ckpt checkpoint_epoch_80_yolodata.pth --data_path /workspace/KITTI/velodyne/train --weight best.pt --conf 0.25 --img-size 640 --source /workspace/KITTI/images/train
- 여러 box fusion 방법에 대해 실행하고 싶으면
--box_fusion옵션 추가
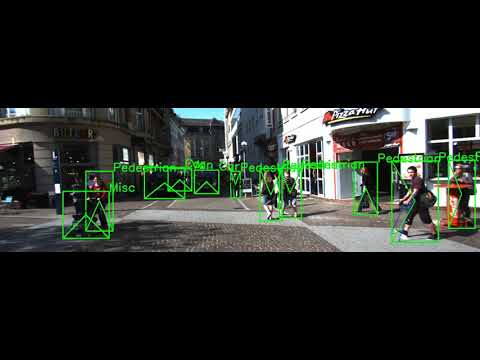
object class, bounding box, depth에 대해 추정한다

- 단일 센서를 사용하는 방법보다 카메라와 LiDAR를 융합한 방법이 더 좋다

객체와의 depth 정확도는 99.21%
- Object가 향하는 방향인 heading 정확도는 91.67%
- 이때 heading 방향은 아래와 같이 정의하였다

- KITTI의 3D Object 데이터셋을 다운받아서 사용했다
└─ KITTI
├── calib <-- camera와 LiDAR 간의 calibration (camera calibration matrices of object data set)
| ├── testing
| └── training
├── images <-- RGB 이미지 데이터
| ├── testing
| └── training
├── labels <-- class, 2D bounding box, dimension, location, rotation 정보
| └── training
├── velodyne <-- LiDAR point cloud 데이터
| ├── testing
| └── training
├── train_cp.txt <-- centerpoint 모델을 위한 train 데이터 경로 리스트
├── train_yolo.txt <-- yolo 모델을 위한 train 데이터 경로 리스트
├── val_cp.txt <-- centerpoint 모델을 위한 val 데이터 경로 리스트
├── val_yolo.txt <-- yolo 모델을 위한 val 데이터 경로 리스트
└── test.txt
- 9개 class
- 'Car', 'Van', 'Truck', 'Pedestrian', 'Person_sitting', 'Cyclist', 'Tram', 'Misc', ‘DontCare’
- 텍스트 파일
- P0, P1, P2, P3
- projection 행렬 (world to image)
- 12개의 값 -> 3x4 행렬
- 본 프로젝트에서는 cam2 이미지 데이터를 사용하기 때문에
P2만 사용한다
- R0_rect
- world 평면으로 회전시켜주는 회전 변환 행렬
- 9개의 값 -> 3x3 행렬
- Tr_velo_to_cam
- LiDAR to camera 변환 행렬
- 9개의 값 -> 3x3 행렬
- YOLO v7 모델
- 2D 이미지에서 객체를 인식하기 위해 yolo v7 모델을 사용한다
- dataset의 경우, KITTI format을 YOLO format으로 변환하여 사용한다 (KITTI/kitti2yolo.py 파일)

- CenterPoint 모델
- LiDAR의 3D 데이터 즉, point cloud 에서 객체를 인식하기 위해 centerpoint 모델을 사용한다

- CenterPoint 모델에서 예측한 3D bounding box를 2D image에 projection 한다


- 3D bounding box 위치 (x, y, z), dimension (width, height, length), yaw 값을 통해 3D bounding box의 8개 꼭지점 추출
- 3D 상의 8개 꼭지점을 2D image 영역으로 projection
- min, max를 이용하여 4개의 꼭지점을 가진 2D bounding box 추출
- CenterPoint에서 예측한 object와 YOLO에서 예측한 object를 융합한다
- IoU 기반 헝가리안 알고리즘을 활용해 두 모델의 검출 결과에서 같은 객체를 추출한다
- 한 모델만 객체를 검출한 경우 confidence 값에 따라 객체로 추출한다
- Weighted Box Fusion 방법을 활용해 두 모델의 bounding box를 하나로 합친다
$new\_box = \frac{box1\_points * box1\_conf + box2\_points * box2\_conf}{box1\_conf + box2\_conf}$
- box를 하나로 합치는 방법을 정하기 위해 아래와 같이 여러 방법을 수행하고 그때의 CIoU 값을 비교하였다
- 그 결과 WBF 방법이 가장 좋았기 때문에 이 방법을 선택하였다

- YOLO 모델의 class를 기본으로 사용한다
- 단, yolo 모델의 결과가 'Dontcare', 'Misc'이고, centerpoint 모델의 결과가 'Misc'가 아닐 때는 centerpoint 모델의 class 사용
- weighted sum 방식으로 yolo의 confidence와 centerpoint의 confidence를 합친다
- 한 모델에서만 object를 검출했을 경우에는 그때의 confidence를 그대로 사용한다
└─ KITTI <-- dataset
└─ yolo_cp
├── models <-- yolo model
├── pcdet <-- centerpoint 모델 관련 라이브러리
├── result_images <-- 결과 이미지들
├── cpconv <-- centerpoint 모델 관련 라이브러리
├── tools/cfg <-- centerpoint model
├── utils <-- yolo 모델 관련 라이브러리
├── best.pt <-- yolo 모델 weight
├── checkpoint_epoch_80_yolodata.pth <-- centerpoint 모델 weight
├── lidar_projection.py <-- lidar point cloud를 이미지로 projection, 시각화
└── our_demo_nahye.py <-- main 파일