"A mission planner for the rest of us"
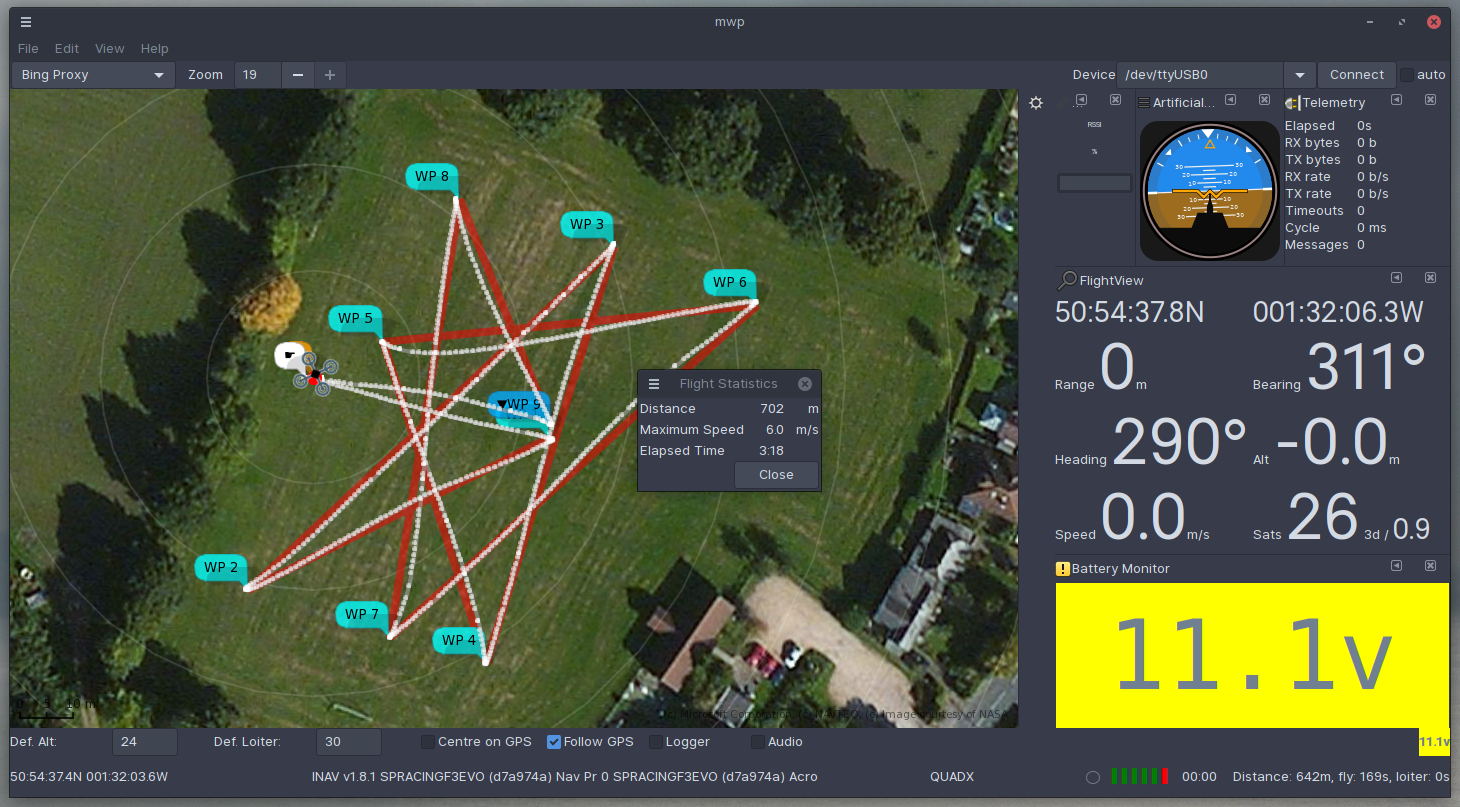
mwptools provides a mission planner, terrain analysis, line of sight analysis, ground control station, real time flight logger and log replay / blackbox replay functions for the INAV FC firmware.
mwptools supports the full set of INAV and Multiwii WP types.
mwp supports the following telemetry protocols:
- MSP (MultiWii Serial Protocol)
- LTM (Lightweight Telemetry)
- MAVLink (INAV subset)
- Smartport (direct / via inverter / or from Multi-protocol Module)
- Crossfire (CRSF)
- Flysky AA (via Multi-protocol Module)
- BulletGCCS MQTT
mwp also supports the real-time display of adjacent aircraft using:
- INAV-radar (INAV UAS)
- MAVlink Traffic Report (e.g. full-size aviation, typically ADS-B via a device such as uAvionix PingRX)
- ADS-B using Dump1090 / SBS-1 Basestation streaming TCP protocol.
- Any other mwp supported telemetry protocol
mwp also provides logging and the replay of:
- mwp log files
- Blackbox logs
- OpenTX CSV (sdcard) logs
- BulletGCSS logs
- Ardupilot (
.bin) log
Log replay requires tools from the flightlog2x project.
There is also an INAV Safehome editor.
In addition, mwp proivdes legacy suport for multiwii navigation functions.
Searchable online user guide.
- mwp : "A mission planner for the rest of us". Simple mission planning and monitoring. Mission Planning is provided for INAV and MW-NAV (MW 2.4+). Monitoring, logging and recording for INAV and MultiWii
- Many standalone tools to manage flight logs, maintain CLI
diffs, analyse logs etc.
The tools are designed to be portable and as far as possible platform and architecture agnostic. The suite is developed on Arch Linux and is tested on Debian (Bullseye, Sid), Ubuntu (latest and most recent LTS), Fedora (current) and FreeBSD (current release). mwp also runs on MS Windows, with Windows 11 / WSL-g is is pretty almost on feature parity with Linux / FreeBSD. Other (older) OS are unsupported, but may work (i.e. Debian 10).
mwp should build and run on any platform that supports (recent versions of):
- gtk+3.0
- meson / ninja
- vala and gcc or clang
- Clutter (software GL is fine)
- libchamplain
- libespeak
- libgdl
- POSIX API
- Go (golang) > 1.17. Please install the latest vendor release on older Linux distros.
mwptools is tested on x86_64, ia32, aarch64 and riscv64 architectures (Linux / FreeBSD).
- There is a "Release" Debian package (x86_64, Debian and derivatives, including WSL-G) Github Releases. This is build on the previous Debiab stable ("bullseye") in order to maximise compatibility across Debian derived distros.
- Simple, "one stop shop" build and install script
- AUR package 'mwptools-git' for Arch Linux.
It is also possible to build and run mwp on MS Windows using:
- Windows 11 / WSL-g Release media, Installation instructions.
- Cygwin Recommended Windows solution prior to Windows 11
- Windows 10 / WSL (slow, less stable, less recommended)
- A virtual machine with a Linux guest.
The user guide and wiki provides further guidance.
For OS not supported by mwp, see also impload for a mission format converter and upload application.
-
Review / install the dependencies for your platform. The documentation directory lists dependencies for Fedora and Debian like systems.
Support questions are best asked in the INAV Discord (#off-topic) or RC Groups board or Github discussions / issues.
As mwptools makes no formal releases, you can update your installation from the master branch:
cd mwptools # the initial installation directory
git pull && cd build && ninja install
Note also that there is a Current Build Debian package mwptools_X.Y.Z_amd64.deb in the Github Releases area that is updated infrequently.
Arch users can install mwptools from the AUR package mwptools-git
As well as supporting INAV, mwp aims to be compatible with EOSBandi's WinGUI for MultiWii. It used the same XML mission file format (with INAV and mwp extensions) and aims to provide similar functionally where possible.
GPL v3 or later
In addition to mwp, the following INAV mission planners (and GCS in some cases) exist, in various states of usefulness, at least:
- INAV Configurator (for INAV 2.x), limited planning support
- INAV Configurator (for current INAV), supports most current WP types (other than "Fly-by-home" waypoints).
- Bullet GCSS GPRS based telemetry using MQTT and a web client (most browsers, Desktop / Tablet / Mobile). Very cool project (you can also use its MQTT protocol with mwp for long range tracking).
- Drone Helper (Windows 10+)
- Android Telemetry Viewer Android GCS for INAV (CRSF, LTM, Smartport telemetry).
- Ezgui, MissionPlanner for Inav (Android) Unsupported, obsolete. May not work with either contemporary Android or INAV firmware.
- Mobile Flight (IOS) Unsupported, obsolete. May not work with either contemporary IOS or INAV firmware.
- Apmplanner2 with impload. Ardupilot planner, missions can be uploaded to INAV using impload.
- qgroundcontrol with impload. Ardupilot planner, missions can be uploaded to INAV using impload.
- Side-Pilot with impload (untested). Ardupilot mission planner and telemetry viewer for IOS.
The following alternatives exist for mwp-area-planner :
- iforce2d's online planner
- qgroundcontrol with impload. Generic surveys and corridor plans are supported. Example images